Interface for linear transform estimators. More...
#include <rgrl_estimator.h>
Public Member Functions | |
| rgrl_linear_estimator () | |
| Default constructor. | |
| rgrl_linear_estimator (unsigned int param_dof) | |
| Constructor. | |
| virtual | ~rgrl_linear_estimator () |
| virtual bool | is_iterative_method () const |
| Linear estimator is non-iterative. | |
| virtual rgrl_transformation_sptr | estimate (rgrl_set_of< rgrl_match_set_sptr > const &matches, rgrl_transformation const &cur_transform) const =0 |
| Estimate the transform. | |
| virtual rgrl_transformation_sptr | estimate (rgrl_match_set_sptr matches, rgrl_transformation const &cur_transform) const |
| Estimate the transform. | |
| unsigned int | param_dof () const |
| The degrees of freedom in the parameter set. | |
| void | set_param_dof (unsigned int dof) |
| Set the degrees of freedom. | |
| virtual unsigned int | residual_dof () const |
| The degrees of freedom in the residual. | |
| virtual const vcl_type_info & | transformation_type () const =0 |
| Type of transformation estimated by this estimator. | |
| virtual const vcl_string | transformation_name () const |
| Name of transformation estimated by this estimator. | |
| rgrl_type_macro (rgrl_estimator, rgrl_object) | |
| virtual bool | is_type (const vcl_type_info &type) const |
| void | set_debug_flag (unsigned int debugFlag) const |
| Set the value of the debug flag. A non-zero value turns debugging on. | |
| unsigned int | debug_flag () const |
| Get the value of the debug flag. | |
| void | set_warning (bool) const |
| Set the flag for warning messages. | |
| bool | warning () const |
| Get the warning flag. | |
| unsigned int | add_observer (rgrl_event_sptr event, rgrl_command_sptr) |
| Allow people to add/remove/invoke observers (callbacks) to any rgrl object. | |
| rgrl_command_sptr | get_command (unsigned int tag) |
| Get the command associated with the given tag. | |
| void | invoke_event (const rgrl_event &) |
| Call execute(.) on all the rgrl_commands observing this event id. | |
| void | invoke_event (const rgrl_event &) const |
| Call execute(.) on all the rgrl_commands observing this event id. | |
| void | remove_observer (unsigned int tag) |
| Remove the observer with this tag value. | |
| bool | has_observer (const rgrl_event &event) const |
| Return true if an observer is registered for this event. | |
| void | ref () |
| void | unref () |
| int | get_references () const |
| bool | is_referenced () const |
Static Public Member Functions | |
| static const vcl_type_info & | type_id () |
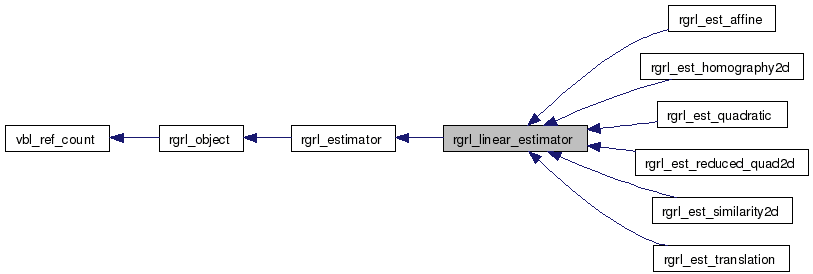
Detailed Description
Interface for linear transform estimators.
An estimator creates a transform object from a set of matches.
Definition at line 125 of file rgrl_estimator.h.
Constructor & Destructor Documentation
| rgrl_linear_estimator::rgrl_linear_estimator | ( | ) | [inline] |
| rgrl_linear_estimator::rgrl_linear_estimator | ( | unsigned int | param_dof | ) | [inline] |
Constructor.
See the comments for param_dof(). The parameter is required by some algorithms such as random sampling and DBICP.
Definition at line 140 of file rgrl_estimator.h.
| virtual rgrl_linear_estimator::~rgrl_linear_estimator | ( | ) | [inline, virtual] |
Definition at line 145 of file rgrl_estimator.h.
Member Function Documentation
| unsigned int rgrl_object::add_observer | ( | rgrl_event_sptr | event, |
| rgrl_command_sptr | cmd | ||
| ) | [inherited] |
Allow people to add/remove/invoke observers (callbacks) to any rgrl object.
This is an implementation of the subject/observer design pattern. An observer is added by specifying an event to respond to and an rgrl_command to execute. It returns an unsigned long tag which can be used later to remove the event or retrieve the command.
Definition at line 47 of file rgrl_object.cxx.
| unsigned int rgrl_object::debug_flag | ( | ) | const [inherited] |
Get the value of the debug flag.
Definition at line 26 of file rgrl_object.cxx.
| virtual rgrl_transformation_sptr rgrl_estimator::estimate | ( | rgrl_set_of< rgrl_match_set_sptr > const & | matches, |
| rgrl_transformation const & | cur_transform | ||
| ) | const [pure virtual, inherited] |
Estimate the transform.
Given a collection of match sets in matches and the current transform estimate (from the previous iteration, for example), this function will estimate the transformation parameters and return a transform object that captures the estimated transform.
Implemented in rgrl_est_spline, rgrl_est_reduced_quad2d, rgrl_est_quadratic, rgrl_est_affine, rgrl_est_similarity2d, rgrl_est_translation, rgrl_est_dis_homo2d_lm, rgrl_est_rigid, rgrl_est_homography2d, rgrl_est_homo2d_lm, rgrl_est_homo2d_proj_rad, and rgrl_est_homo2d_proj.
| rgrl_transformation_sptr rgrl_estimator::estimate | ( | rgrl_match_set_sptr | matches, |
| rgrl_transformation const & | cur_transform | ||
| ) | const [virtual, inherited] |
Estimate the transform.
Given a set of matches in matches and the current transform estimate (from the previous iteration, for example), this function will estimate the transformation parameters and return a transform object that captures the estimated transform.
The default implementation in the abstract base class will simply construct a size one collection of match sets and call the other estimate function.
Reimplemented in rgrl_est_reduced_quad2d, rgrl_est_spline, rgrl_est_quadratic, rgrl_est_affine, rgrl_est_similarity2d, rgrl_est_translation, rgrl_est_rigid, rgrl_est_dis_homo2d_lm, and rgrl_est_homography2d.
Definition at line 31 of file rgrl_estimator.cxx.
| rgrl_command_sptr rgrl_object::get_command | ( | unsigned int | tag | ) | [inherited] |
Get the command associated with the given tag.
Definition at line 57 of file rgrl_object.cxx.
| bool rgrl_object::has_observer | ( | const rgrl_event & | event | ) | const [inherited] |
Return true if an observer is registered for this event.
Definition at line 107 of file rgrl_object.cxx.
| void rgrl_object::invoke_event | ( | const rgrl_event & | event | ) | [inherited] |
Call execute(.) on all the rgrl_commands observing this event id.
Definition at line 69 of file rgrl_object.cxx.
| void rgrl_object::invoke_event | ( | const rgrl_event & | event | ) | const [inherited] |
Call execute(.) on all the rgrl_commands observing this event id.
The actions triggered by this call doesn't modify this object.
Definition at line 83 of file rgrl_object.cxx.
| virtual bool rgrl_linear_estimator::is_iterative_method | ( | ) | const [inline, virtual] |
Linear estimator is non-iterative.
Implements rgrl_estimator.
Definition at line 152 of file rgrl_estimator.h.
| virtual bool rgrl_object::is_type | ( | const vcl_type_info & | type | ) | const [inline, virtual, inherited] |
Reimplemented in rgrl_scale_estimator.
Definition at line 66 of file rgrl_object.h.
| unsigned int rgrl_estimator::param_dof | ( | ) | const [inline, inherited] |
The degrees of freedom in the parameter set.
Definition at line 81 of file rgrl_estimator.h.
| void rgrl_object::remove_observer | ( | unsigned int | tag | ) | [inherited] |
Remove the observer with this tag value.
Definition at line 97 of file rgrl_object.cxx.
| virtual unsigned int rgrl_estimator::residual_dof | ( | ) | const [inline, virtual, inherited] |
The degrees of freedom in the residual.
Most of the time, this would be 1 since the residual comes from a single random variable. In some problems, however, the error is the combination of more than one random variable. (For example, if the residual is a 2d Euclidean distance with possible error in both coordinates, the degrees of freedom in the error will be 2.)
Definition at line 94 of file rgrl_estimator.h.
| rgrl_estimator::rgrl_type_macro | ( | rgrl_estimator | , |
| rgrl_object | |||
| ) | [inherited] |
| void rgrl_object::set_debug_flag | ( | unsigned int | debugFlag | ) | const [inherited] |
Set the value of the debug flag. A non-zero value turns debugging on.
Definition at line 19 of file rgrl_object.cxx.
| void rgrl_estimator::set_param_dof | ( | unsigned int | dof | ) | [inline, inherited] |
Set the degrees of freedom.
Definition at line 84 of file rgrl_estimator.h.
| void rgrl_object::set_warning | ( | bool | flag | ) | const [inherited] |
Set the flag for warning messages.
Definition at line 33 of file rgrl_object.cxx.
| virtual const vcl_string rgrl_estimator::transformation_name | ( | ) | const [inline, virtual, inherited] |
Name of transformation estimated by this estimator.
It is more useful when a transformation/estimator pair is capable of storing/estimating several models, usually differing in dof
Reimplemented in rgrl_est_homo2d_proj_rad.
Definition at line 105 of file rgrl_estimator.h.
| virtual const vcl_type_info& rgrl_estimator::transformation_type | ( | ) | const [pure virtual, inherited] |
Type of transformation estimated by this estimator.
Implemented in rgrl_est_reduced_quad2d, rgrl_est_spline, rgrl_est_quadratic, rgrl_est_affine, rgrl_est_similarity2d, rgrl_est_translation, rgrl_est_rigid, rgrl_est_dis_homo2d_lm, rgrl_est_homography2d, rgrl_est_homo2d_lm, rgrl_est_homo2d_proj_rad, and rgrl_est_homo2d_proj.
| static const vcl_type_info& rgrl_object::type_id | ( | ) | [inline, static, inherited] |
Reimplemented in rgrl_scale_estimator.
Definition at line 63 of file rgrl_object.h.
| bool rgrl_object::warning | ( | ) | const [inherited] |
Get the warning flag.
Definition at line 40 of file rgrl_object.cxx.
The documentation for this class was generated from the following file:
- contrib/rpl/rgrl/rgrl_estimator.h
