#include <bugl_uncertainty_point_2d.h>
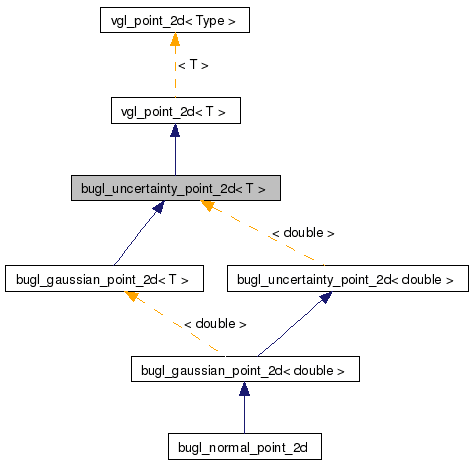
Inheritance diagram for bugl_uncertainty_point_2d< T >:
Public Member Functions | |
| bugl_uncertainty_point_2d () | |
| bugl_uncertainty_point_2d (T x, T y) | |
| bugl_uncertainty_point_2d (vgl_point_2d< T > const &p) | |
| virtual | ~bugl_uncertainty_point_2d () |
| virtual T | prob_at (vgl_point_2d< T > const &p) const =0 |
| bool | exists () const |
| void | set_point () |
| set as if this point is not initialised (as with default constructor). | |
| void | set_point (vgl_point_2d< T > const &p) |
| bool | operator== (vgl_point_2d< T >const &p) const |
| bool | operator!= (vgl_point_2d< T >const &p) const |
| T & | x () |
| T | x () const |
| T & | y () |
| T | y () const |
| void | set (Tpx, Tpy) |
| void | set (Tconst p[2]) |
| bool | ideal (T=(T) 0) const |
| vcl_istream & | read (vcl_istream &is) |
| vgl_point_2d< T > | vgl_closest_point_origin (vgl_line_2d< T > const &l) |
| double | vgl_distance (vgl_point_2d< T >const &p1, vgl_point_2d< T >const &p2) |
| bool | vgl_intersection (vgl_point_2d< T > const &p0, vgl_point_2d< T > const &p1) |
| bool | vgl_intersection (vgl_point_3d< T > const &p0, vgl_point_3d< T > const &p1) |
| bool | vgl_intersection (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, vgl_point_2d< T > const &q1, vgl_point_2d< T > const &q2, double tol=1e-6) |
| vcl_vector< vgl_point_2d< T > > | vgl_intersection (vgl_polygon< T > const &poly, vgl_line_2d< T > const &line) |
| vcl_ostream & | operator<< (vcl_ostream &s, vgl_point_2d< T > const &p) |
| vcl_istream & | operator>> (vcl_istream &s, vgl_point_2d< T > &p) |
| vgl_vector_2d< T > | operator- (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2) |
| vgl_point_2d< T > | operator- (vgl_point_2d< T > const &p, vgl_vector_2d< T > const &v) |
| vgl_point_2d< T > | operator+ (vgl_point_2d< T > const &p, vgl_vector_2d< T > const &v) |
| vgl_point_2d< T > & | operator+= (vgl_point_2d< T > &p, vgl_vector_2d< T > const &v) |
| vgl_point_2d< T > & | operator-= (vgl_point_2d< T > &p, vgl_vector_2d< T > const &v) |
| double | cross_ratio (vgl_point_2d< T >const &p1, vgl_point_2d< T >const &p2, vgl_point_2d< T >const &p3, vgl_point_2d< T >const &p4) |
| bool | collinear (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, vgl_point_2d< T > const &p3) |
| double | ratio (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, vgl_point_2d< T > const &p3) |
| vgl_point_2d< T > | midpoint (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, Tf=(T) 0.5) |
| vgl_point_2d< T > | centre (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2) |
| vgl_point_2d< T > | centre (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, vgl_point_2d< T > const &p3) |
| vgl_point_2d< T > | centre (vgl_point_2d< T > const &p1, vgl_point_2d< T > const &p2, vgl_point_2d< T > const &p3, vgl_point_2d< T > const &p4) |
| vgl_point_2d< T > | centre (vcl_vector< vgl_point_2d< T > > const &v) |
Protected Attributes | |
| bool | exists_ |
Detailed Description
template<class T>
class bugl_uncertainty_point_2d< T >
Definition at line 17 of file bugl_uncertainty_point_2d.h.
Constructor & Destructor Documentation
template<class T>
| bugl_uncertainty_point_2d< T >::bugl_uncertainty_point_2d | ( | ) | [inline] |
Definition at line 20 of file bugl_uncertainty_point_2d.h.
template<class T>
| bugl_uncertainty_point_2d< T >::bugl_uncertainty_point_2d | ( | T | x, |
| T | y | ||
| ) | [inline] |
Definition at line 21 of file bugl_uncertainty_point_2d.h.
template<class T>
| bugl_uncertainty_point_2d< T >::bugl_uncertainty_point_2d | ( | vgl_point_2d< T > const & | p | ) | [inline] |
Definition at line 22 of file bugl_uncertainty_point_2d.h.
template<class T>
| virtual bugl_uncertainty_point_2d< T >::~bugl_uncertainty_point_2d | ( | ) | [inline, virtual] |
Definition at line 23 of file bugl_uncertainty_point_2d.h.
Member Function Documentation
| vgl_point_2d< T > vgl_point_2d< T >::centre | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2 | ||
| ) | [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::centre | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| vgl_point_2d< T > const & | p3 | ||
| ) | [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::centre | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| vgl_point_2d< T > const & | p3, | ||
| vgl_point_2d< T > const & | p4 | ||
| ) | [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::centre | ( | vcl_vector< vgl_point_2d< T > > const & | v | ) | [inherited] |
| bool vgl_point_2d< T >::collinear | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| vgl_point_2d< T > const & | p3 | ||
| ) | [inherited] |
| double vgl_point_2d< T >::cross_ratio | ( | vgl_point_2d< T >const & | p1, |
| vgl_point_2d< T >const & | p2, | ||
| vgl_point_2d< T >const & | p3, | ||
| vgl_point_2d< T >const & | p4 | ||
| ) | [inherited] |
template<class T>
| bool bugl_uncertainty_point_2d< T >::exists | ( | ) | const [inline] |
Definition at line 25 of file bugl_uncertainty_point_2d.h.
| bool vgl_point_2d< T >::ideal | ( | T | = (Type) 0 | ) | const [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::midpoint | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| T | f = (Type) 0.5 |
||
| ) | [inherited] |
| bool vgl_point_2d< T >::operator!= | ( | vgl_point_2d< T >const & | p | ) | const [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::operator+ | ( | vgl_point_2d< T > const & | p, |
| vgl_vector_2d< T > const & | v | ||
| ) | [inherited] |
| vgl_point_2d< T > & vgl_point_2d< T >::operator+= | ( | vgl_point_2d< T > & | p, |
| vgl_vector_2d< T > const & | v | ||
| ) | [inherited] |
| vgl_vector_2d< T > vgl_point_2d< T >::operator- | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2 | ||
| ) | [inherited] |
| vgl_point_2d< T > vgl_point_2d< T >::operator- | ( | vgl_point_2d< T > const & | p, |
| vgl_vector_2d< T > const & | v | ||
| ) | [inherited] |
| vgl_point_2d< T > & vgl_point_2d< T >::operator-= | ( | vgl_point_2d< T > & | p, |
| vgl_vector_2d< T > const & | v | ||
| ) | [inherited] |
| vcl_ostream & vgl_point_2d< T >::operator<< | ( | vcl_ostream & | s, |
| vgl_point_2d< T > const & | p | ||
| ) | [inherited] |
| bool vgl_point_2d< T >::operator== | ( | vgl_point_2d< T >const & | p | ) | const [inherited] |
| vcl_istream & vgl_point_2d< T >::operator>> | ( | vcl_istream & | s, |
| vgl_point_2d< T > & | p | ||
| ) | [inherited] |
template<class T>
| virtual T bugl_uncertainty_point_2d< T >::prob_at | ( | vgl_point_2d< T > const & | p | ) | const [pure virtual] |
Implemented in bugl_gaussian_point_2d< T >, and bugl_gaussian_point_2d< double >.
| double vgl_point_2d< T >::ratio | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| vgl_point_2d< T > const & | p3 | ||
| ) | [inherited] |
| vcl_istream & vgl_point_2d< T >::read | ( | vcl_istream & | is | ) | [inherited] |
| void vgl_point_2d< T >::set | ( | T const | p[2] | ) | [inherited] |
| void vgl_point_2d< T >::set | ( | T | px, |
| T | py | ||
| ) | [inherited] |
template<class T>
| void bugl_uncertainty_point_2d< T >::set_point | ( | ) | [inline] |
set as if this point is not initialised (as with default constructor).
Definition at line 27 of file bugl_uncertainty_point_2d.h.
template<class T>
| void bugl_uncertainty_point_2d< T >::set_point | ( | vgl_point_2d< T > const & | p | ) | [inline] |
Definition at line 28 of file bugl_uncertainty_point_2d.h.
| vgl_point_2d< T > vgl_point_2d< T >::vgl_closest_point_origin | ( | vgl_line_2d< T > const & | l | ) | [inherited] |
| double vgl_point_2d< T >::vgl_distance | ( | vgl_point_2d< T >const & | p1, |
| vgl_point_2d< T >const & | p2 | ||
| ) | [inherited] |
| bool vgl_point_2d< T >::vgl_intersection | ( | vgl_point_2d< T > const & | p0, |
| vgl_point_2d< T > const & | p1 | ||
| ) | [inherited] |
| bool vgl_point_2d< T >::vgl_intersection | ( | vgl_point_3d< T > const & | p0, |
| vgl_point_3d< T > const & | p1 | ||
| ) | [inherited] |
| bool vgl_point_2d< T >::vgl_intersection | ( | vgl_point_2d< T > const & | p1, |
| vgl_point_2d< T > const & | p2, | ||
| vgl_point_2d< T > const & | q1, | ||
| vgl_point_2d< T > const & | q2, | ||
| double | tol = 1e-6 |
||
| ) | [inherited] |
| vcl_vector< vgl_point_2d< T > > vgl_point_2d< T >::vgl_intersection | ( | vgl_polygon< T > const & | poly, |
| vgl_line_2d< T > const & | line | ||
| ) | [inherited] |
| T & vgl_point_2d< T >::x | ( | void | ) | [inherited] |
| T vgl_point_2d< T >::x | ( | void | ) | const [inherited] |
| T vgl_point_2d< T >::y | ( | void | ) | const [inherited] |
| T & vgl_point_2d< T >::y | ( | void | ) | [inherited] |
Member Data Documentation
template<class T>
bool bugl_uncertainty_point_2d< T >::exists_ [protected] |
Definition at line 30 of file bugl_uncertainty_point_2d.h.
The documentation for this class was generated from the following file:
- contrib/brl/bbas/bugl/bugl_uncertainty_point_2d.h
