Public Member Functions | |
| virtual | ~mfpf_pf_cost () |
| mfpf_pf_cost (mfpf_point_finder &pf, const vimt_image_2d_of< float > &image, const vgl_point_2d< double > &p0, const vgl_vector_2d< double > &u0, double ds, double dA) | |
| virtual double | f (const vnl_vector< double > ¶ms) |
| Given the parameter vector x, compute the value of f(x). | |
| void | get_pose (const vnl_vector< double > ¶ms, vgl_point_2d< double > &p, vgl_vector_2d< double > &u) const |
| bool | check_and_refine_minima (vnl_vector< double > ¶ms, double &fit, unsigned index, double dx) |
| Checks if parameter index is at minima by displacing by +/-dx. | |
| virtual void | gradf (vnl_vector< double > const &x, vnl_vector< double > &gradient) |
| vnl_vector< double > | gradf (vnl_vector< double > const &x) |
| virtual void | compute (vnl_vector< double > const &x, double *f, vnl_vector< double > *g) |
| int | get_number_of_unknowns () const |
| void | fdgradf (vnl_vector< double > const &x, vnl_vector< double > &gradient, double stepsize=1e-5) |
| vnl_vector< double > | fdgradf (vnl_vector< double > const &x) |
| virtual double | reported_error (double f_value) |
| virtual double | get_range_min () const |
| virtual double | get_range_max () const |
| virtual vnl_unary_function < double, vnl_vector< double > > * | Copy () const |
Public Attributes | |
| int | dim |
Protected Member Functions | |
| void | set_number_of_unknowns (int number_of_unknowns) |
Private Attributes | |
| mfpf_point_finder * | pf_ |
| const vimt_image_2d_of< float > & | image_ |
| vgl_point_2d< double > | p_ |
| vgl_vector_2d< double > | u_ |
| vgl_vector_2d< double > | v_ |
| double | ds_ |
| double | dA_ |
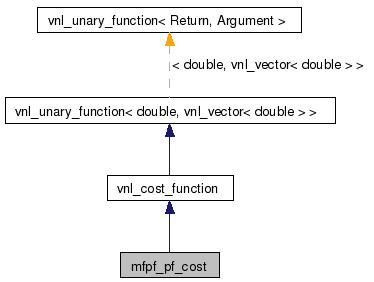
Detailed Description
Definition at line 34 of file mfpf_point_finder.cxx.
Constructor & Destructor Documentation
| virtual mfpf_pf_cost::~mfpf_pf_cost | ( | ) | [inline, virtual] |
Definition at line 44 of file mfpf_point_finder.cxx.
| mfpf_pf_cost::mfpf_pf_cost | ( | mfpf_point_finder & | pf, |
| const vimt_image_2d_of< float > & | image, | ||
| const vgl_point_2d< double > & | p0, | ||
| const vgl_vector_2d< double > & | u0, | ||
| double | ds, | ||
| double | dA | ||
| ) | [inline] |
Definition at line 45 of file mfpf_point_finder.cxx.
Member Function Documentation
| bool mfpf_pf_cost::check_and_refine_minima | ( | vnl_vector< double > & | params, |
| double & | fit, | ||
| unsigned | index, | ||
| double | dx | ||
| ) |
Checks if parameter index is at minima by displacing by +/-dx.
If it is, then uses parabolic fit to attempt to improved it. fit is f(params). On exit params contains new values, and fit contains new fit at that position.
Definition at line 93 of file mfpf_point_finder.cxx.
| double mfpf_pf_cost::f | ( | const vnl_vector< double > & | params | ) | [virtual] |
Given the parameter vector x, compute the value of f(x).
Reimplemented from vnl_cost_function.
Definition at line 71 of file mfpf_point_finder.cxx.
| void mfpf_pf_cost::get_pose | ( | const vnl_vector< double > & | params, |
| vgl_point_2d< double > & | p, | ||
| vgl_vector_2d< double > & | u | ||
| ) | const |
Definition at line 79 of file mfpf_point_finder.cxx.
Member Data Documentation
double mfpf_pf_cost::dA_ [private] |
Definition at line 42 of file mfpf_point_finder.cxx.
double mfpf_pf_cost::ds_ [private] |
Definition at line 42 of file mfpf_point_finder.cxx.
const vimt_image_2d_of<float>& mfpf_pf_cost::image_ [private] |
Definition at line 38 of file mfpf_point_finder.cxx.
vgl_point_2d<double> mfpf_pf_cost::p_ [private] |
Definition at line 39 of file mfpf_point_finder.cxx.
mfpf_point_finder* mfpf_pf_cost::pf_ [private] |
Definition at line 37 of file mfpf_point_finder.cxx.
vgl_vector_2d<double> mfpf_pf_cost::u_ [private] |
Definition at line 40 of file mfpf_point_finder.cxx.
vgl_vector_2d<double> mfpf_pf_cost::v_ [private] |
Definition at line 41 of file mfpf_point_finder.cxx.
The documentation for this class was generated from the following file:
- contrib/mul/mfpf/mfpf_point_finder.cxx
