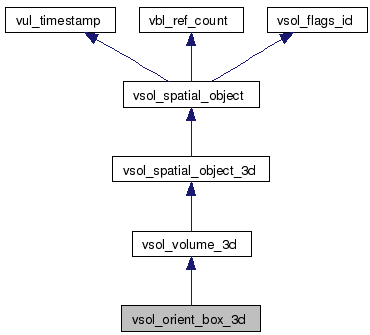
An oriented bounding box for 3d spatial objects. More...
#include <vsol_orient_box_3d.h>
Public Types | |
| enum | vsol_spatial_object_3d_type { SPATIAL_NO_TYPE = 0, TOPOLOGYOBJECT, POINT, CURVE, REGION, SPATIALGROUP, VOLUME, NUM_SPATIALOBJECT_TYPES } |
Public Member Functions | |
| vsol_orient_box_3d () | |
| create an empty box. | |
| vsol_orient_box_3d (vgl_orient_box_3d< double > const &orient_box) | |
| creates a bounding box from an oriented box. | |
| vsol_orient_box_3d (vsol_orient_box_3d const &b) | |
| ~vsol_orient_box_3d () | |
| virtual vsol_spatial_object_3d * | clone (void) const |
| Clone `this': creation of a new object and initialization. | |
| double | get_min_x () const |
| double | get_max_x () const |
| double | get_min_y () const |
| double | get_max_y () const |
| double | get_min_z () const |
| double | get_max_z () const |
| double | width () const |
| double | height () const |
| double | depth () const |
| double | volume () const |
| Return the volume of `this'. | |
| bool | in (vsol_point_3d_sptr const &p) const |
| Is the point `p' inside `this' volume ?. | |
| void | add_point (double x, double y, double z) |
| enlarge the bounding box by adding the point (x,y,z) & taking convex hull. | |
| virtual vcl_string | is_a () const |
| Return a platform independent string identifying the class. | |
| virtual bool | is_class (const vcl_string &cls) const |
| Return true if the argument matches the string identifying the class or any parent class. | |
| virtual vsol_volume_3d * | cast_to_volume () |
| virtual vsol_volume_3d const * | cast_to_volume () const |
| virtual vsol_polyhedron * | cast_to_polyhedron () |
| virtual vsol_polyhedron const * | cast_to_polyhedron () const |
| vsol_spatial_object_3d_type | spatial_type (void) const |
| Return the spatial type of `this'. | |
| const char * | get_name () const |
| void | un_protect () |
| unprotect the object. | |
| short | version () const |
| Return IO version number;. | |
| virtual void | b_write (vsl_b_ostream &os) const |
| Binary save self to stream. | |
| virtual void | b_read (vsl_b_istream &is) |
| Binary load self from stream. | |
| virtual void | print (vcl_ostream &strm=vcl_cout) const |
| virtual void | describe (vcl_ostream &=vcl_cout, int=0) const |
| virtual bool | operator== (vsol_spatial_object_3d const &obj) const |
| bool | operator!= (vsol_spatial_object_3d const &obj) |
| vsol_box_3d_sptr | get_bounding_box () const |
| virtual vsol_spatial_object_3d * | cast_to_spatial_object () |
| The same behavior than dynamic_cast<>. | |
| virtual vsol_spatial_object_3d const * | cast_to_spatial_object () const |
| virtual vtol_topology_object * | cast_to_topology_object () |
| virtual vtol_topology_object const * | cast_to_topology_object () const |
| virtual vsol_spatial_object_3d * | cast_to_vsol_spatial_object () |
| virtual vsol_spatial_object_3d const * | cast_to_vsol_spatial_object () const |
| virtual vsol_point_3d * | cast_to_point () |
| virtual vsol_point_3d const * | cast_to_point () const |
| virtual vsol_curve_3d * | cast_to_curve () |
| virtual vsol_curve_3d const * | cast_to_curve () const |
| virtual vsol_surface_3d * | cast_to_surface () |
| virtual vsol_surface_3d const * | cast_to_surface () const |
| virtual vsol_region_3d * | cast_to_region () |
| virtual vsol_region_3d const * | cast_to_region () const |
| virtual vsol_group_3d * | cast_to_group () |
| virtual vsol_group_3d const * | cast_to_group () const |
| void | touch () |
| unsigned long | get_time_stamp () const |
| bool | older (vul_timestamp const &t) const |
| bool | older (vul_timestamp const *t) const |
| void | ref () |
| void | unref () |
| int | get_references () const |
| bool | is_referenced () const |
| int | get_id () const |
| get id of object. | |
| void | set_id (int i) |
| set id of object. | |
| void | set_user_flag (unsigned int flag) |
| set a flag for a spatial object; flag can be VSOL_FLAG[1-6]. | |
| bool | get_user_flag (unsigned int flag) |
| check if a flag is set for a spatial object; flag can be VSOL_FLAG[1-6]. | |
| void | unset_user_flag (unsigned int flag) |
| un-set a flag for a spatial object; flag can be VSOL_FLAG[1-6]. | |
| void | set_tagged_union_flag () |
| set the flag used by TAGGED_UNION. | |
| bool | get_tagged_union_flag () |
| check if the flag used by TAGGED_UNION is set. | |
| void | unset_tagged_union_flag () |
| un-set the flag used by TAGGED_UNION. | |
| int | get_tag_id () |
| void | set_tag_id (int id) |
Static Public Attributes | |
| static const char * | SpatialTypes [] |
| static const float | eps = 1.0e-3f |
Protected Types | |
| enum | vsol_volume_3d_type { VOLUME_NO_TYPE = 0, POLYHEDRON, NUM_VOLUME_TYPES } |
Protected Member Functions | |
| vsol_volume_3d_type | volume_type (void) const |
| void | not_applicable (vcl_string const &message) const |
| void | empty_bounding_box () const |
| make the bounding box empty; often first step in bounding box calculation. | |
| void | set_bounding_box (vsol_box_3d_sptr const &box) const |
| set the bounding box; to be used in bounding box calculation. | |
| void | set_bounding_box (double x, double y, double z) const |
| set the bounding box to a single point, discarding the old bounding box. | |
| void | add_to_bounding_box (double x, double y, double z) const |
| add a point to the bounding box and take the convex union. | |
| void | add_to_bounding_box (vsol_box_3d_sptr const &box) const |
| set the existing bounding box to the convex union of it with the given box. | |
| void | grow_minmax_bounds (vsol_box_3d_sptr const &b) const |
| grow to the largest dim. of this and box, i.e., take the convex union. | |
| virtual void | compute_bounding_box () const |
| compute bounding box, do nothing in this case except touching the box. | |
| void | check_update_bounding_box () const |
| Test consistency of bound. | |
Protected Attributes | |
| vbl_bounding_box< double, 3 > | box_ |
| vgl_orient_box_3d< double > | orient_box_ |
| unsigned long | timestamp_ |
| unsigned int | tag_ |
| int | id_ |
Static Protected Attributes | |
| static int | tagcount_ = 0 |
Friends | |
| vcl_ostream & | operator<< (vcl_ostream &, vsol_spatial_object_3d const &) |
| vcl_ostream & | operator<< (vcl_ostream &, vsol_spatial_object_3d const *) |
Detailed Description
An oriented bounding box for 3d spatial objects.
Definition at line 22 of file vsol_orient_box_3d.h.
Member Enumeration Documentation
enum vsol_spatial_object_3d::vsol_spatial_object_3d_type [inherited] |
- Enumerator:
SPATIAL_NO_TYPE TOPOLOGYOBJECT POINT CURVE REGION SPATIALGROUP VOLUME NUM_SPATIALOBJECT_TYPES
Definition at line 90 of file vsol_spatial_object_3d.h.
enum vsol_volume_3d::vsol_volume_3d_type [protected, inherited] |
Definition at line 25 of file vsol_volume_3d.h.
Constructor & Destructor Documentation
| vsol_orient_box_3d::vsol_orient_box_3d | ( | ) | [inline] |
create an empty box.
Definition at line 30 of file vsol_orient_box_3d.h.
| vsol_orient_box_3d::vsol_orient_box_3d | ( | vgl_orient_box_3d< double > const & | orient_box | ) |
creates a bounding box from an oriented box.
Definition at line 11 of file vsol_orient_box_3d.cxx.
| vsol_orient_box_3d::vsol_orient_box_3d | ( | vsol_orient_box_3d const & | b | ) | [inline] |
Definition at line 35 of file vsol_orient_box_3d.h.
| vsol_orient_box_3d::~vsol_orient_box_3d | ( | ) | [inline] |
Definition at line 38 of file vsol_orient_box_3d.h.
Member Function Documentation
| void vsol_orient_box_3d::add_point | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) |
enlarge the bounding box by adding the point (x,y,z) & taking convex hull.
Definition at line 73 of file vsol_orient_box_3d.cxx.
| void vsol_spatial_object_3d::add_to_bounding_box | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) | const [protected, inherited] |
add a point to the bounding box and take the convex union.
This is a "const" method since the bounding box is a "mutable" data member: calculating the bounding box does not change the object.
Definition at line 79 of file vsol_spatial_object_3d.cxx.
| void vsol_spatial_object_3d::add_to_bounding_box | ( | vsol_box_3d_sptr const & | box | ) | const [protected, inherited] |
set the existing bounding box to the convex union of it with the given box.
Definition at line 84 of file vsol_spatial_object_3d.cxx.
| void vsol_spatial_object_3d::b_read | ( | vsl_b_istream & | is | ) | [virtual, inherited] |
Binary load self from stream.
Reimplemented in vsol_point_3d, vsol_polyline_3d, vsol_line_3d, vsol_polygon_3d, vsol_polyhedron, vsol_group_3d, vsol_rectangle_3d, vsol_triangle_3d, vsol_digital_curve_3d, and vsol_cylinder.
Definition at line 154 of file vsol_spatial_object_3d.cxx.
| void vsol_spatial_object_3d::b_write | ( | vsl_b_ostream & | os | ) | const [virtual, inherited] |
Binary save self to stream.
Reimplemented in vsol_point_3d, vsol_polyline_3d, vsol_line_3d, vsol_polygon_3d, vsol_polyhedron, vsol_group_3d, vsol_rectangle_3d, vsol_triangle_3d, vsol_digital_curve_3d, and vsol_cylinder.
Definition at line 145 of file vsol_spatial_object_3d.cxx.
| virtual vsol_curve_3d* vsol_spatial_object_3d::cast_to_curve | ( | ) | [inline, virtual, inherited] |
Reimplemented in vsol_curve_3d.
Definition at line 206 of file vsol_spatial_object_3d.h.
| virtual vsol_curve_3d const* vsol_spatial_object_3d::cast_to_curve | ( | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_curve_3d.
Definition at line 207 of file vsol_spatial_object_3d.h.
| virtual vsol_group_3d* vsol_spatial_object_3d::cast_to_group | ( | void | ) | [inline, virtual, inherited] |
Reimplemented in vsol_group_3d, and vsol_group_3d.
Definition at line 214 of file vsol_spatial_object_3d.h.
| virtual vsol_group_3d const* vsol_spatial_object_3d::cast_to_group | ( | void | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_group_3d.
Definition at line 215 of file vsol_spatial_object_3d.h.
| virtual vsol_point_3d* vsol_spatial_object_3d::cast_to_point | ( | void | ) | [inline, virtual, inherited] |
Reimplemented in vsol_point_3d, and vsol_point_3d.
Definition at line 204 of file vsol_spatial_object_3d.h.
| virtual vsol_point_3d const* vsol_spatial_object_3d::cast_to_point | ( | void | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_point_3d, and vsol_point_3d.
Definition at line 205 of file vsol_spatial_object_3d.h.
| virtual vsol_polyhedron* vsol_volume_3d::cast_to_polyhedron | ( | void | ) | [inline, virtual, inherited] |
Reimplemented in vsol_polyhedron.
Definition at line 43 of file vsol_volume_3d.h.
| virtual vsol_polyhedron const* vsol_volume_3d::cast_to_polyhedron | ( | void | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_polyhedron, and vsol_polyhedron.
Definition at line 44 of file vsol_volume_3d.h.
| virtual vsol_region_3d* vsol_spatial_object_3d::cast_to_region | ( | void | ) | [inline, virtual, inherited] |
Reimplemented in vsol_region_3d, and vsol_surface_3d.
Definition at line 212 of file vsol_spatial_object_3d.h.
| virtual vsol_region_3d const* vsol_spatial_object_3d::cast_to_region | ( | void | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_region_3d, vsol_region_3d, and vsol_surface_3d.
Definition at line 213 of file vsol_spatial_object_3d.h.
| virtual vsol_spatial_object_3d* vsol_spatial_object_3d::cast_to_spatial_object | ( | ) | [inline, virtual, inherited] |
The same behavior than dynamic_cast<>.
Needed because VXL is not necessarily compiled with -frtti
Definition at line 196 of file vsol_spatial_object_3d.h.
| virtual vsol_spatial_object_3d const* vsol_spatial_object_3d::cast_to_spatial_object | ( | ) | const [inline, virtual, inherited] |
Definition at line 197 of file vsol_spatial_object_3d.h.
| virtual vsol_surface_3d* vsol_spatial_object_3d::cast_to_surface | ( | void | ) | [inline, virtual, inherited] |
Reimplemented in vsol_surface_3d.
Definition at line 208 of file vsol_spatial_object_3d.h.
| virtual vsol_surface_3d const* vsol_spatial_object_3d::cast_to_surface | ( | void | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_surface_3d, and vsol_surface_3d.
Definition at line 209 of file vsol_spatial_object_3d.h.
| virtual vtol_topology_object* vsol_spatial_object_3d::cast_to_topology_object | ( | ) | [inline, virtual, inherited] |
Definition at line 199 of file vsol_spatial_object_3d.h.
| virtual vtol_topology_object const* vsol_spatial_object_3d::cast_to_topology_object | ( | ) | const [inline, virtual, inherited] |
Definition at line 200 of file vsol_spatial_object_3d.h.
| virtual vsol_volume_3d* vsol_volume_3d::cast_to_volume | ( | ) | [inline, virtual, inherited] |
Reimplemented from vsol_spatial_object_3d.
Definition at line 40 of file vsol_volume_3d.h.
| virtual vsol_volume_3d const* vsol_volume_3d::cast_to_volume | ( | ) | const [inline, virtual, inherited] |
Reimplemented from vsol_spatial_object_3d.
Definition at line 41 of file vsol_volume_3d.h.
| virtual vsol_spatial_object_3d* vsol_spatial_object_3d::cast_to_vsol_spatial_object | ( | ) | [inline, virtual, inherited] |
Definition at line 202 of file vsol_spatial_object_3d.h.
| virtual vsol_spatial_object_3d const* vsol_spatial_object_3d::cast_to_vsol_spatial_object | ( | ) | const [inline, virtual, inherited] |
Definition at line 203 of file vsol_spatial_object_3d.h.
| void vsol_spatial_object_3d::check_update_bounding_box | ( | ) | const [protected, inherited] |
Test consistency of bound.
Bounds Accessors:.
min_ and max_ are provided as methods on vsol_spatial_object_3d to be consistent with the previous interface Additional bounds accessors are available directly on vsol_box_3d. - JLM
Definition at line 97 of file vsol_spatial_object_3d.cxx.
| virtual vsol_spatial_object_3d* vsol_orient_box_3d::clone | ( | void | ) | const [inline, virtual] |
Clone `this': creation of a new object and initialization.
See Prototype pattern
Implements vsol_spatial_object_3d.
Definition at line 40 of file vsol_orient_box_3d.h.
| void vsol_spatial_object_3d::compute_bounding_box | ( | void | ) | const [protected, virtual, inherited] |
compute bounding box, do nothing in this case except touching the box.
Reimplemented in vsol_polyline_3d, vsol_line_3d, vsol_polygon_3d, vsol_point_3d, vsol_polyhedron, vsol_digital_curve_3d, and vsol_group_3d.
Definition at line 59 of file vsol_spatial_object_3d.cxx.
| double vsol_orient_box_3d::depth | ( | ) | const [inline] |
Definition at line 55 of file vsol_orient_box_3d.h.
| virtual void vsol_spatial_object_3d::describe | ( | vcl_ostream & | = vcl_cout, |
| int | = 0 |
||
| ) | const [inline, virtual, inherited] |
Reimplemented in vsol_point_3d, vsol_line_3d, vsol_polygon_3d, vsol_polyline_3d, vsol_polyhedron, vsol_group_3d, vsol_rectangle_3d, vsol_triangle_3d, vsol_tetrahedron, vsol_digital_curve_3d, and vsol_cylinder.
Definition at line 150 of file vsol_spatial_object_3d.h.
| void vsol_spatial_object_3d::empty_bounding_box | ( | ) | const [protected, inherited] |
make the bounding box empty; often first step in bounding box calculation.
Definition at line 64 of file vsol_spatial_object_3d.cxx.
| vsol_box_3d_sptr vsol_spatial_object_3d::get_bounding_box | ( | ) | const [inline, inherited] |
Definition at line 161 of file vsol_spatial_object_3d.h.
| int vsol_flags_id::get_id | ( | ) | const [inline, inherited] |
get id of object.
Definition at line 52 of file vsol_flags_id.h.
| double vsol_orient_box_3d::get_max_x | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 31 of file vsol_orient_box_3d.cxx.
| double vsol_orient_box_3d::get_max_y | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 43 of file vsol_orient_box_3d.cxx.
| double vsol_orient_box_3d::get_max_z | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 55 of file vsol_orient_box_3d.cxx.
| double vsol_orient_box_3d::get_min_x | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 25 of file vsol_orient_box_3d.cxx.
| double vsol_orient_box_3d::get_min_y | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 37 of file vsol_orient_box_3d.cxx.
| double vsol_orient_box_3d::get_min_z | ( | ) | const |
Reimplemented from vsol_spatial_object_3d.
Definition at line 49 of file vsol_orient_box_3d.cxx.
| const char * vsol_spatial_object_3d::get_name | ( | ) | const [inherited] |
Definition at line 40 of file vsol_spatial_object_3d.cxx.
| int vsol_flags_id::get_tag_id | ( | ) | [inline, inherited] |
Definition at line 106 of file vsol_flags_id.h.
| bool vsol_flags_id::get_tagged_union_flag | ( | ) | [inline, inherited] |
check if the flag used by TAGGED_UNION is set.
Definition at line 95 of file vsol_flags_id.h.
| bool vsol_flags_id::get_user_flag | ( | unsigned int | flag | ) | [inline, inherited] |
check if a flag is set for a spatial object; flag can be VSOL_FLAG[1-6].
Definition at line 77 of file vsol_flags_id.h.
| void vsol_spatial_object_3d::grow_minmax_bounds | ( | vsol_box_3d_sptr const & | b | ) | const [inline, protected, inherited] |
grow to the largest dim. of this and box, i.e., take the convex union.
Definition at line 186 of file vsol_spatial_object_3d.h.
| double vsol_orient_box_3d::height | ( | ) | const [inline] |
Definition at line 54 of file vsol_orient_box_3d.h.
| bool vsol_orient_box_3d::in | ( | vsol_point_3d_sptr const & | p | ) | const [virtual] |
Is the point `p' inside `this' volume ?.
Implements vsol_volume_3d.
Definition at line 61 of file vsol_orient_box_3d.cxx.
| virtual vcl_string vsol_orient_box_3d::is_a | ( | ) | const [inline, virtual] |
Return a platform independent string identifying the class.
Reimplemented from vsol_volume_3d.
Definition at line 66 of file vsol_orient_box_3d.h.
| virtual bool vsol_orient_box_3d::is_class | ( | const vcl_string & | cls | ) | const [inline, virtual] |
Return true if the argument matches the string identifying the class or any parent class.
Reimplemented from vsol_volume_3d.
Definition at line 69 of file vsol_orient_box_3d.h.
| void vsol_spatial_object_3d::not_applicable | ( | vcl_string const & | message | ) | const [inline, protected, inherited] |
Definition at line 113 of file vsol_spatial_object_3d.h.
| bool vsol_spatial_object_3d::operator!= | ( | vsol_spatial_object_3d const & | obj | ) | [inline, inherited] |
Definition at line 157 of file vsol_spatial_object_3d.h.
| virtual bool vsol_spatial_object_3d::operator== | ( | vsol_spatial_object_3d const & | obj | ) | const [inline, virtual, inherited] |
Reimplemented in vsol_group_3d, vsol_line_3d, vsol_polygon_3d, vsol_polyline_3d, vsol_point_3d, vsol_polyhedron, vsol_rectangle_3d, vsol_triangle_3d, and vsol_digital_curve_3d.
Definition at line 156 of file vsol_spatial_object_3d.h.
| virtual void vsol_spatial_object_3d::print | ( | vcl_ostream & | strm = vcl_cout | ) | const [inline, virtual, inherited] |
Definition at line 149 of file vsol_spatial_object_3d.h.
| void vsol_spatial_object_3d::set_bounding_box | ( | vsol_box_3d_sptr const & | box | ) | const [protected, inherited] |
set the bounding box; to be used in bounding box calculation.
Definition at line 74 of file vsol_spatial_object_3d.cxx.
| void vsol_spatial_object_3d::set_bounding_box | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) | const [protected, inherited] |
set the bounding box to a single point, discarding the old bounding box.
This is a "const" method since the bounding box is a "mutable" data member: calculating the bounding box does not change the object.
Definition at line 69 of file vsol_spatial_object_3d.cxx.
| void vsol_flags_id::set_id | ( | int | i | ) | [inline, inherited] |
set id of object.
Definition at line 54 of file vsol_flags_id.h.
| void vsol_flags_id::set_tag_id | ( | int | id | ) | [inline, inherited] |
Definition at line 111 of file vsol_flags_id.h.
| void vsol_flags_id::set_tagged_union_flag | ( | ) | [inline, inherited] |
set the flag used by TAGGED_UNION.
Definition at line 89 of file vsol_flags_id.h.
| void vsol_flags_id::set_user_flag | ( | unsigned int | flag | ) | [inline, inherited] |
set a flag for a spatial object; flag can be VSOL_FLAG[1-6].
Definition at line 71 of file vsol_flags_id.h.
| vsol_spatial_object_3d_type vsol_volume_3d::spatial_type | ( | void | ) | const [inline, virtual, inherited] |
Return the spatial type of `this'.
Implements vsol_spatial_object_3d.
Definition at line 52 of file vsol_volume_3d.h.
| void vsol_spatial_object_3d::un_protect | ( | ) | [inline, inherited] |
unprotect the object.
Definition at line 128 of file vsol_spatial_object_3d.h.
| void vsol_flags_id::unset_tagged_union_flag | ( | ) | [inline, inherited] |
un-set the flag used by TAGGED_UNION.
Definition at line 101 of file vsol_flags_id.h.
| void vsol_flags_id::unset_user_flag | ( | unsigned int | flag | ) | [inline, inherited] |
un-set a flag for a spatial object; flag can be VSOL_FLAG[1-6].
Definition at line 83 of file vsol_flags_id.h.
| short vsol_spatial_object_3d::version | ( | ) | const [inherited] |
Return IO version number;.
Reimplemented in vsol_point_3d, vsol_polyline_3d, vsol_line_3d, vsol_polygon_3d, vsol_polyhedron, vsol_group_3d, vsol_rectangle_3d, vsol_triangle_3d, vsol_digital_curve_3d, and vsol_cylinder.
Definition at line 54 of file vsol_spatial_object_3d.cxx.
| double vsol_orient_box_3d::volume | ( | ) | const [inline, virtual] |
Return the volume of `this'.
Implements vsol_volume_3d.
Definition at line 56 of file vsol_orient_box_3d.h.
| vsol_volume_3d_type vsol_volume_3d::volume_type | ( | void | ) | const [inline, protected, inherited] |
Reimplemented in vsol_polyhedron.
Definition at line 30 of file vsol_volume_3d.h.
| double vsol_orient_box_3d::width | ( | ) | const [inline] |
Definition at line 53 of file vsol_orient_box_3d.h.
Friends And Related Function Documentation
| vcl_ostream& operator<< | ( | vcl_ostream & | strm, |
| vsol_spatial_object_3d const & | so | ||
| ) | [friend, inherited] |
Definition at line 220 of file vsol_spatial_object_3d.h.
| vcl_ostream& operator<< | ( | vcl_ostream & | strm, |
| vsol_spatial_object_3d const * | so | ||
| ) | [friend, inherited] |
Definition at line 226 of file vsol_spatial_object_3d.h.
Member Data Documentation
vbl_bounding_box<double,3> vsol_orient_box_3d::box_ [protected] |
Definition at line 25 of file vsol_orient_box_3d.h.
const float vsol_spatial_object_3d::eps = 1.0e-3f [static, inherited] |
Definition at line 103 of file vsol_spatial_object_3d.h.
int vsol_flags_id::id_ [protected, inherited] |
Definition at line 39 of file vsol_flags_id.h.
vgl_orient_box_3d<double> vsol_orient_box_3d::orient_box_ [protected] |
Definition at line 26 of file vsol_orient_box_3d.h.
const char * vsol_spatial_object_3d::SpatialTypes [static, inherited] |
{
"NO_TYPE ",
"TOPOLOGYOBJECT ",
"POINT ",
"CURVE ",
"REGION ",
"SPATIALGROUP ",
"NUM_SPATIALOBJECT_TYPES"
}
Definition at line 102 of file vsol_spatial_object_3d.h.
unsigned int vsol_flags_id::tag_ [protected, inherited] |
Definition at line 38 of file vsol_flags_id.h.
int vsol_flags_id::tagcount_ = 0 [static, protected, inherited] |
Definition at line 40 of file vsol_flags_id.h.
The documentation for this class was generated from the following files:
- contrib/gel/vsol/vsol_orient_box_3d.h
- contrib/gel/vsol/vsol_orient_box_3d.cxx
